

I allt högre grad finns det en begäranför att öka antalet parkeringsplatseri ett begränsat område i en stor stad. Vi delar vår erfarenhet av att lösa detta problem.
Låt oss anta att det finns en investerare som har köpt en gammal byggnad i stadens centrum och planerar att bygga en ny bostadsbyggnad med 24 lägenheter här. En av de första frågorna som en designer kommer att möta när man beräknar en byggnad är hur man tillhandahåller det nödvändiga antalet parkeringsplatser. Det finns en minsta standard för antalet parkeringsplatser, och en lägenhet utan parkering i mitten av en metropol värderas mycket lägre än med parkering.
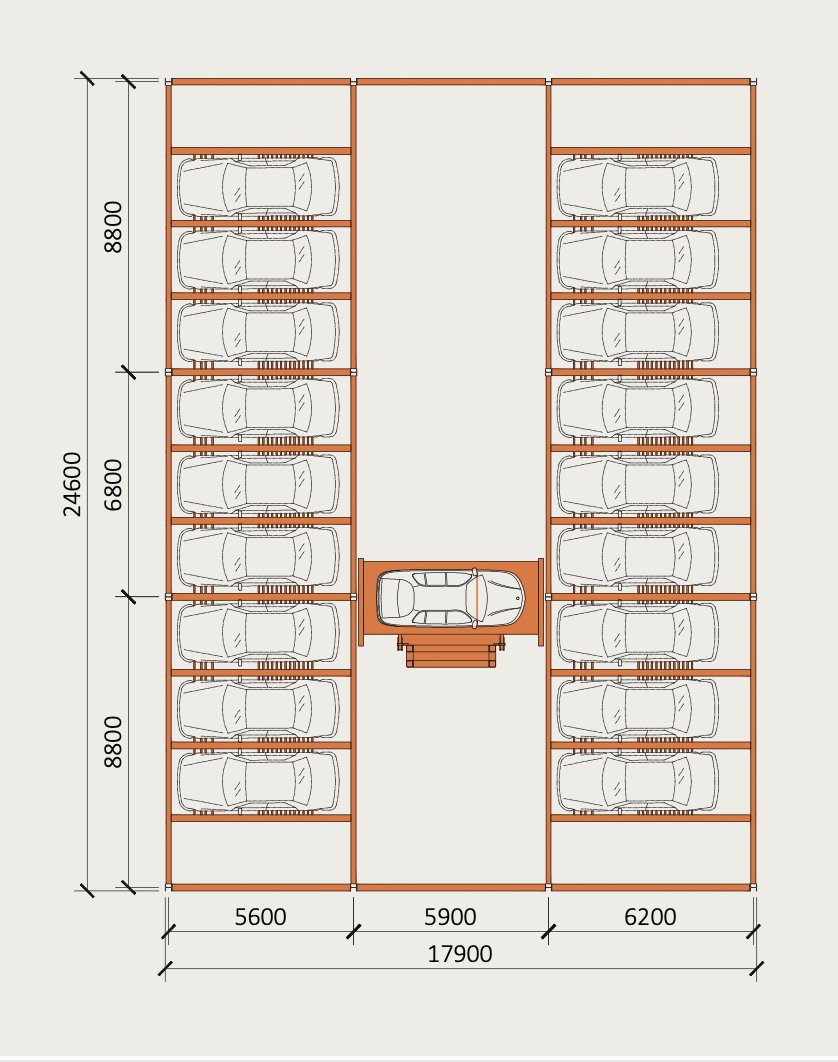
Situationen är att området förexisterande Parkeringsplatsen är liten. Det finns inget utrymme för parkering på gatan. Byggnadens storlek tillåter inte att organisera en traditionell underjordisk parkering med en ramp, uppfart som tillåter manövrering vid parkering, och möjligheten att fördjupa är också begränsad på grund av stadskommunikation. Storleken på parkeringsplatsen är 24600 x 17900 meter, det maximala möjliga djupet är 7 meter. Även med användning av en mekaniserad hiss (billyft) kan högst 18 parkeringsplatser tillhandahållas. Men detta räcker ofta inte.
Det finns bara ett alternativ kvar -För att automatisera parkeringför bilar i den underjordiska delen av huset. Och här står designern inför uppgiften att välja utrustning som gör att han kan få minst 34 parkeringsplatser i ett begränsat utrymme.
I det här fallet kommer Mutrade att erbjuda dig att överväga två alternativ -Parkering av robotlös typellerAutomatiserad parkering av pallstyp. En layoutlösning kommer att bildas, som kan tillämpas med hänsyn till byggnadens befintliga begränsningar och egenskaper, samt med hänsyn till platsen för ingången till parkeringsplatsen och åtkomstvägarna.
Att förstå hurParkering av robotlös typi grunden skiljer sig frånAutomatiserad parkering av pallstyp, Låt oss ge en liten förklaring.
Parkering av robotlös typär ett pallelöst parkeringssystem: En bil parkeras på en parkeringsplats med hjälp av en robot som kör upp under bilen, plockar upp den under hjulen och tar den till lagringscellen. Denna lösning påskyndar parkeringsprocessen och förenklar parkeringsunderhåll under drift.


Automatiserad parkering av pallstypär ett palllagringssystem för bilar: bilen är först installerad på en pall (pall), och sedan, tillsammans med pallen, installeras i en förvaringscell. Denna lösning är långsammare, parkeringsprocessen tar lite längre tid, men problemet med minsta avstånd av bilar som tillåts för parkering tas bort.

Så layoutlösningen är klar. Med tanke på byggnadens konfiguration och dess plats är robotställparkering det bästa valet. Det visade sig placera 34 parkeringsplatser. Bilar placeras i två nivåer. Mottagningsbox - cirka 0,00. Från mottagningsrutan flyttas bilen av en robot till en trepoordinat manipulator (en billyft som kan röra sig upp och ner, såväl som till höger och vänster), som levererar bilen tillsammans med roboten till önskad önskad lagringscell.
Designern sätter det av Mutrade robotparkering som erbjuds i projektet i Buildng och därigenom tillhandahåller det nödvändiga antalet parkeringsplatser.
Uppgiften att placera 34 parkeringsplatser i en liten underjordisk parkering har slutförts. Men det finns fortfarande arbete som ska göras för att samordna placeringen av utrustning med alla tekniska nätverk och belastningar av byggnaden för att framgångsrikt genomföra projektet i framtiden.
Beroende på projekten i projektet, kan kundkraven för automatisering och budgeten för projektet för parkeringsutrustning också erbjuda att använda halvautomatisk eller enkel parkering, till exempel pusselparkering eller en beroende parkeringsstaplare.

Posttid: feb-21-2023






