

Pli kaj pli, estas petoPor pliigi la nombron de parkumejojen limigita areo en granda urbo. Ni dividas nian sperton pri solvo de ĉi tiu problemo.
Ni supozu, ke estas investanto, kiu aĉetis malnovan konstruaĵon en la urbocentro kaj planas konstrui novan loĝan konstruaĵon kun 24 apartamentoj ĉi tie. Unu el la unuaj demandoj, kiujn projektisto alfrontos kiam kalkulas konstruaĵon, estas kiel provizi la bezonatan nombron da parkumejoj. Ekzistas minimuma normo por la nombro de parkumejoj, kaj apartamento sen parkado en la centro de metropolo estas taksata multe malpli ol kun parkado.
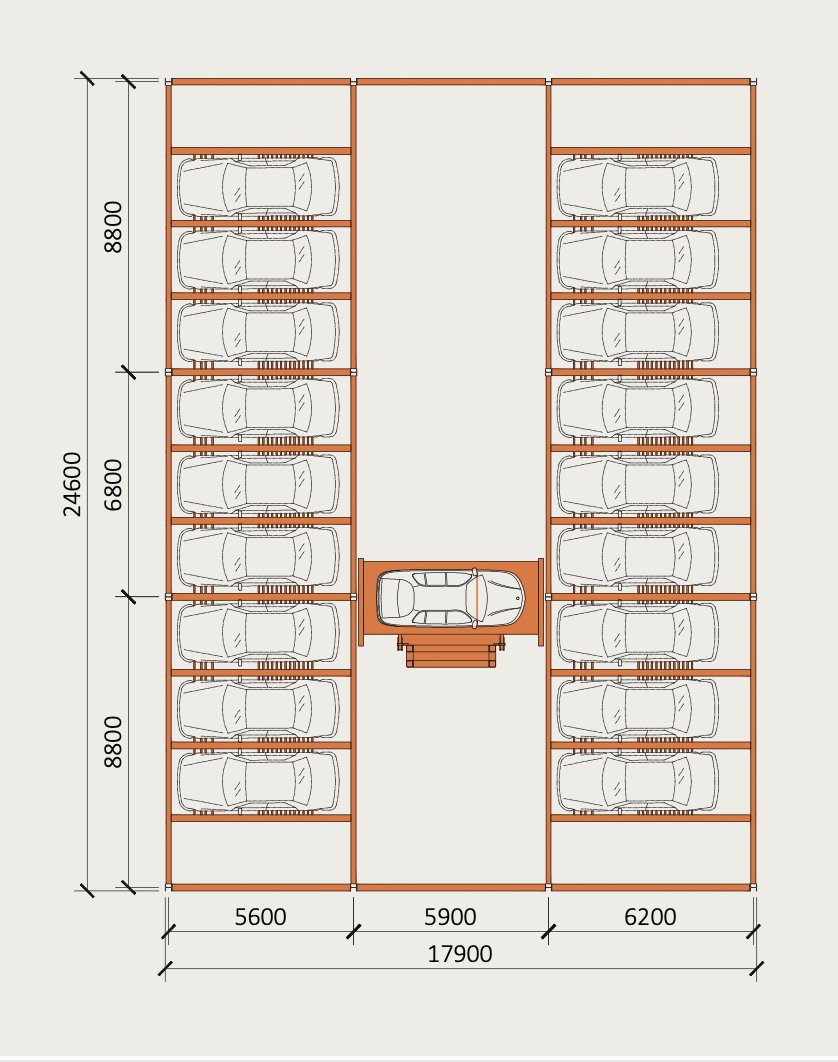
La situacio estas, ke la areo de laEkzistanta Parkejo estas malgranda. Ne estas spaco por parkado sur la strato. La grandeco de la konstruaĵo ne permesas organizi tradician subteran parkadon kun ramplo, enirejoj, kiuj permesas manovradon kiam parkado, kaj la ebleco profundigi ankaŭ estas limigita pro urbaj komunikadoj. La grandeco de la parkumejo estas 24600 x 17900 metroj, la maksimuma ebla profundo estas 7 metroj. Eĉ per la uzo de mekanizita lifto (aŭta lifto), ne pli ol 18 parkumejoj povas esti provizitaj. Sed ĉi tio ofte ne sufiĉas.
Restas nur unu eblo -aŭtomatigi parkadonpor aŭtoj en la subtera parto de la domo. Kaj ĉi tie la projektisto alfrontas la taskon elekti ekipaĵon, kiu permesos al li akiri almenaŭ 34 parkumejojn en limigita spaco.
En ĉi tiu kazo, Mutrade ofertos al vi konsideri 2 eblojn -robota senprokta parkadoAŭAŭtomata paleta tipo parkado. Aranĝa solvo estos formita, kiu povas esti aplikata konsiderante la ekzistantajn limigojn kaj karakterizaĵojn de la konstruaĵo, kaj ankaŭ konsiderante la lokon de la enirejo al la parkejo kaj aliraj vojoj.
Kompreni kielrobota senprokta parkadoFundamente diferencas deAŭtomata paleta tipo parkado, ni donu iom da klarigo.
Robota senprokta parkadoestas sensenca parkumada sistemo: aŭto estas parkumita en parkejo helpe de roboto, kiu veturas sub la aŭto, reprenas ĝin sub la radoj kaj portas ĝin al la stokado. Ĉi tiu solvo rapidigas la parkadan procezon kaj simpligas prizorgadon de parkado dum operacio.


Aŭtomata paleta tipo parkadoestas paleta stokada sistemo por aŭtoj: la aŭto unue estas instalita sur paleto (paleto), kaj poste kune kun la paleto estas instalita en stokada ĉelo. Ĉi tiu solvo estas pli malrapida, la parkada procezo daŭras iom pli longe, tamen la problemo kun la minimuma malplenigo de aŭtoj permesitaj por parkado estas forigita.

Do, la aranĝa solvo estas preta. Konsiderante la agordon de la konstruaĵo kaj ĝia loko, robota rako -parkado estas la plej bona elekto. Rezultis meti 34 parkumejojn. Aŭtoj estas metitaj en 2 nivelojn. Ricevanta skatolo - ĉirkaŭ 0,00. De la riceva skatolo, la aŭto estas movita per roboto al tri-kunordigita manipulanto (aŭto-levo, kiu povas moviĝi supren kaj malsupren, same kiel dekstren kaj maldekstren), kiu liveras la aŭton kune kun la roboto al la dezirata Stokada ĉelo.
La projektisto enmetas la ofertitan de Mutrade Robotic Parking en la projekton de la konstruaĵo, tiel provizante la bezonatan nombron de parkumejoj.
La tasko meti 34 parkumejojn en malgrandan subteran parkadon estis finita. Sed ankoraŭ estas laboro por kunordigi la lokadon de ekipaĵo kun ĉiuj inĝenieristikaj retoj kaj ŝarĝoj de la konstruaĵo por sukcese efektivigi la projekton en la estonteco.
Depende de la ecoj de la projekto, la klientaj postuloj por aŭtomatigo kaj la buĝeto de la projekto por parkumado, Mutrade ankaŭ povas oferti uzi duon-aŭtomatajn aŭ simplajn parkumojn, kiel enigmo-parkado aŭ dependaj parkumejoj.

Afiŝotempo: Feb-21-2023






